Mars, Underground
Looking for life on other planets? Go deep.
:focal(805x663:806x664)/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/filer/7b/35/7b35745f-b58b-438a-ab3d-b551199c254b/planetary_cave_opener.jpg)
In a muggy hotel room off I-40 in Grants, New Mexico, two roboticists from NASA’s Jet Propulsion Laboratory are bent over a mass of electronics, the open body of a robot called LEMUR, short for Limbed Excursion Mechanical Utility Robot. LEMUR is designed to climb the porous walls of a cave 150 million miles away, on Mars. At the moment, though, its four multi-jointed limbs are piled in a heap in the closet, beside the complimentary ironing board.
Grants is the perfect place to field test a climbing robot. It’s surrounded by an ancient volcanic lava flow spread across the landscape like a jagged sea of Oreo cookie crumbs. In one corner of the flow, located in nearby El Malpais National Monument, is a network of subterranean corridors known as lava tubes: long, winding caves big enough to drive a subway train through. There are tubes just like them on Mars, only bigger, due to that planet’s weaker gravity. They may be some of the best places in the solar system to look for extraterrestrial life.
Subscribe to Air & Space Magazine Now
This story is a selection from the June-July issue of Air & Space magazine
LEMUR climbs walls in much the same way cockroaches do, gripping the surface with hundreds of tiny microspines in the pads of its paw-like feet (early designs were inspired by conversations with entomologists). For the time being, its pace is more like that of a sloth, as it makes sure every grip is a secure one. The robot had just started its first climb in the New Mexico tubes when it started smoking. A short had developed in one of its joints, probably caused by jostling either on the drive from California or on the bumpy hike from the nearby trailhead. Christine Fuller and Neil Abcouwer have been testing LEMUR’s 28 joints, one by one, trying to locate the short. They’ve been doing this for three days, running the hotel room’s shower and wearing special bracelets to cut down on static electricity so they don’t further damage the robot.
“Sit rep is: We’ve verified that nothing’s wrong [with LEMUR] just when sitting on the table,” says Abcouwer, looking a little rumpled after a long day of tinkering. The day before, he carried LEMUR to the cave wall on his back, like a passed-out toddler, before setting it up to climb.
Thus begin great feats in planetary exploration.
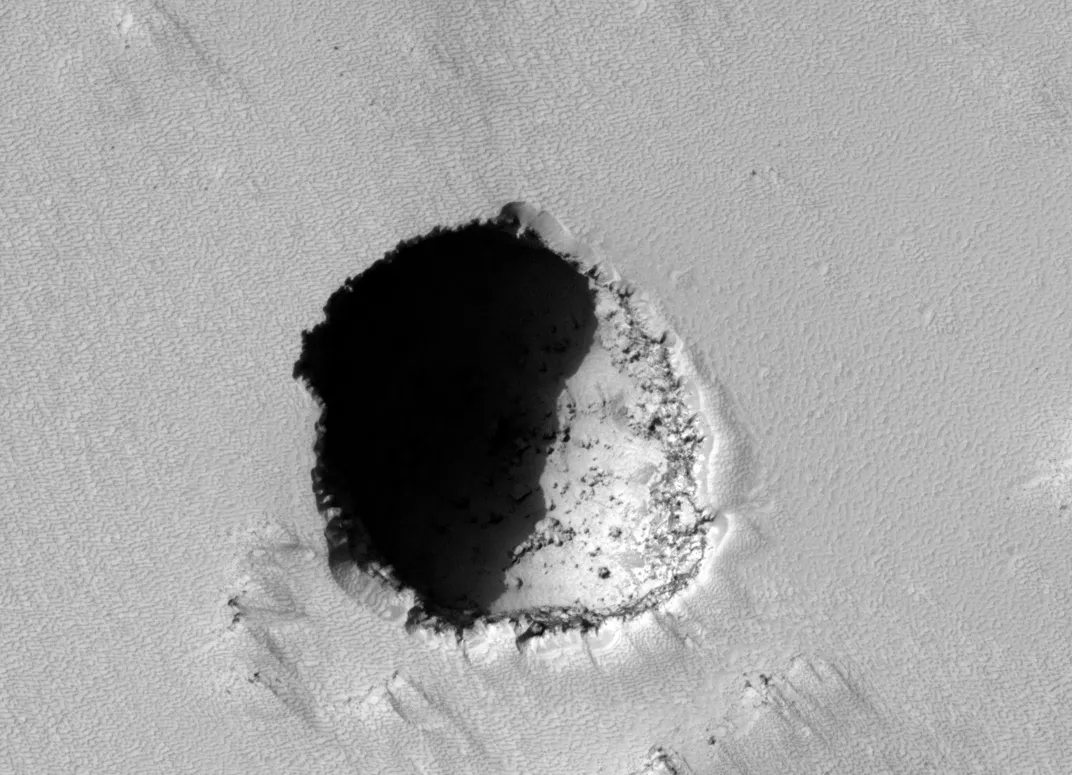
The capabilities that a LEMUR-like robot could bring to astrobiology are indeed great. Planetary geologists have known since the first up-close pictures were taken of planetary surfaces in the 1960s that Mars and Earth’s moon also have lava tubes—sinuous, hollowed-out rilles caused by lava flowing on the surface during episodes of volcanism. It wasn’t until 2007, though, that NASA’s Mars Reconnaissance Orbiter found the first opening to one of these caves, where the roof of a tube has partially collapsed, creating a “skylight,” which from above looks like a giant pit. By 2009, the Japanese lunar orbiter SELENE had seen skylights on the moon, as well as other pits and holes of various geological origins. Since then, hundreds more caves have been located, creating a potential new field of science: space speleology.
Why explore extraterrestrial caves? Partly for the same reasons scientists venture into caves on Earth. They’re protected from weather and (on other worlds) from meteoric bombardment, so their geological formations serve as frozen records of the planet’s past. Then there’s the life question. Liquid water on Mars is likely to exist underground, at depths where ice is melted by warmth from the planet’s interior. In caves, the temperature stays relatively stable, so they would also offer refuge from the 200-degree Fahrenheit day-night swings on the surface. Most important, they offer protection from radiation. Since Mars’ protective magnetic field flickered out eons ago, the constant barrage of cosmic rays on the surface likely would have destroyed any exposed critters. If life moved underground to escape, caves are a good place to look for fossil evidence of their tenancy. It’s even possible that in some Martian caves, life still exists.
“This is where the action is in terms of exploration,” says Penny Boston, a veteran cave scientist who just left the New Mexico Institute of Mining and Technology to become director of the NASA Astrobiology Institute, the agency’s focal point in the search for extraterrestrial life. Recently she’s been a leading advocate for what may strike many as a novel idea: that the ideal place to search for alien biology is not on the Martian surface, where NASA’s rovers have been looking, but beneath it.
In the early 1980s, Boston was one of the founders of the Mars Underground, a group of graduate students dedicated to putting human exploration of the Red Planet on NASA’s agenda, at a time when the agency was more focused on building a space station in Earth orbit. Since then, she has traveled everywhere from Sardinia to the Sahara, exploring some of the most exotic environments on Earth as a way to understand other planets. A few years ago, Boston spent time in this very El Malpais lava tube, trying to determine whether such a formation could provide shelter for humans setting up a base on Mars. Now she’s strategizing about the search for Martian life. The conventional approach is to look for chemical “biomarkers”; Boston says her perspective is different. “I think we need to be casting our net further afield in case [Mars] life is chemically unrelated to the way our life conducts business,” she says.
Boston is studying the patterns Earth microbes tend to print on cave walls: labyrinthine calcium deposits called biovermiculation. She believes they would never occur accidentally, even on another planet. If such patterns exist in a Martian cave, she says, there’s a good chance microbes made them. “The compelling thing about them is, it’s a macroscopic biosignature of microscopic life. A lot of NASA’s work has focused on how we look at the molecular constituents of life. And I’m like, ‘That’s great, but what if it’s not based on DNA?’ ”

In a perfect world, Boston would prefer to look for these patterns in person. But robots will likely beat her to it. She’s here at El Malpais evaluating a camera and computer integrated with LEMUR’s body. The idea is that the robot would use pattern recognition software to make its own rough assessment as to whether markings on a cave wall could be biovermiculation or just a random pattern. If an area was promising, the robot would decide autonomously whether to look more closely. A team led by Nancy Chanover, a planetary scientist at New Mexico State, is adding another experiment to this particular expedition—a small spectroscope designed to inspect caves for chemical signs of life.
In the lava tube next to this one, other JPL researchers are testing an idea for a new communication method that could let a cave-exploring robot talk to its lander through many feet of rock. Others test a technique that could map caves from orbit.
Boston and Aaron Parness, a JPL roboticist with his hand in many of the lab’s most forward-thinking projects, have convened this diverse crew to encourage collaboration between scientists and engineers. LEMUR has been designed with Boston and Chanover’s science in mind, and this field test is the first attempt to have it work in the wild; the group also wants to see if the robot can recognize known biovermiculation patterns on the lava tube walls. Unfortunately, LEMUR’s mishap has scuttled much of the week’s agenda.
“Until you actually get out in terrain like this, which is what the rest of the solar system is made out of, you think you know what it’s gonna be,” says Boston. “I think for the young roboticists on the team, it’s a big eye-opener.”
LEMUR had worked flawlessly in lab trials. But a future Mars mission would have to face getting a rover into, around, and out of a cave like this—while doing scientifically useful work at the same time. The challenge is almost laughably difficult.
First you’ve got to land as close as possible to the cave opening, to avoid wasting energy on a long trek across the surface before the exploration even begins. As the lander flies over the cave, it should be gathering information that shows a rough layout of the entrance. The flyover has to be perfectly executed in order to get the maximum view of the area just inside the cave opening; picture walking past an open doorway and, as your viewpoint changes, seeing as much as you can inside the room. A cave-exploring robot, in other words, will have to land with far more precision than Curiosity, which touched down more than a mile from its target site on Mars. Ideally, the lander should be able to fly directly over an opening that may be only 100 yards wide, and land within 100 yards of its edge.
And landing is the easy part.
A robot descending into a skylight would have to be lowered onto the cave floor by a crane anchored on the surface, or possibly by another robot suspended from a kind of tightrope strung across the pit. A team from Carnegie Mellon University, led by veteran roboticist Red Whittaker, is working on two robots that use the second method. The team tested it in the lava tubes of Craters of the Moon National Monument in Idaho. It worked, mostly, although the team had a harder time than they’d expected stringing the tightrope across the pit and getting it taut enough to allow the aerial bot to wheel along it. Alone on another planet, the bots would have to use a rocket fitted with an anchor to string the cable across the cave opening, or send a surface rover to walk the unanchored end to the other side.
“We did a lot of field tests, and in each one we built more capability into the system,” says Uland Wong, who co-led the CMU team. “As it got more complex, it got more and more difficult to set up, and there were more possibilities for things going wrong.”
LEMUR is designed to crawl into a cave opening without assistance, and the robot would have to navigate the unpredictable twists and turns of a lava tube, just as a human cave explorer would, perhaps at times even hanging by one or two paws in order to get around big obstacles.
“There’s definitely some evil terrain geometries in there,” says Parness. “That’s why the robot’s got to be smart. It’s got to pick the path of most probable success.” At this stage of development, LEMUR is barely able to step over a small crack in a wall, so it’s got a long way to go before it’s ready for Mars.

As for getting a sample out of a cave and back to Earth for analysis, Boston has no illusions about the challenge ahead. “Having [retrieved samples] myself many times, it’s a logistical difficulty that I think is really beyond our current or immediately foreseeable generation of robotic devices,” she says. Plan A, therefore, is for the robot to carry instruments sophisticated enough to do the analysis onsite—hence the field tests by Boston and Chanover. Another solution could be to train smaller robots to bring samples back to a more capable mother robot based near the opening of the cave. The mother would then analyze the sample using better, more power-hogging instruments and relay the data to the nearby lander, who would send it on to Earth.
Even the smaller robots would have trouble moving around, however—far more trouble than Curiosity-type rovers have on the surface. Cave floors are often uneven surfaces strewn with debris. The CMU team’s wheeled rover is based on the same “rock crawler” chassis design used in off-road vehicles on Earth, and they’re using software that captures a human driver’s performance in order to teach the robot how to navigate choppy terrain.
“It worked fairly well,” Wong says of the Idaho field tests. In previous trials, there had been “many instances where it flipped itself over. It’s still a developing technology.”
Wong has since moved on to NASA’s Ames Research Center in California, where he’s developing a solution for the mobility problem: passive instrument stations that don’t move at all under their own power but are launched out of a cannon by a larger robot and scattered to the far corners of the cave, where they take readings and relay communications as a network.
Boston and colleagues have proposed similar “swarm” solutions; theirs involve hundreds of little hopper robots that, once released into a cave opening, would mindlessly flip themselves along until they got stuck. Engineers at the University of Southampton in England have proposed packing such a robot swarm into a Mars surface lander, then sending them out in all directions to search for cave openings that are too small to see from orbit. When they found something, they would return, much as honeybees do after they’ve been out looking for flowers. Another project, called Arne, developed by planetary scientists at Arizona State University, would land a spacecraft at the bottom of a lunar pit; the craft would then open to deploy three tiny flying “pit-bots,” which would use chemically fueled micro-thrusters to fly around the cave in short bursts, bypassing the floor debris altogether.
But each of these concepts has a stumbling block: communications. The radio waves used by rovers to receive commands and relay data can’t penetrate rock, and, given the terrain, a cable tether isn’t practical. Without a link to the surface, a cave robot couldn’t go far from its base station before losing contact.
At El Malpais, JPL’s Darmindra Arumugam and Steven Carnes are testing an idea that could make possible at least basic messaging between a cave rover and the surface. They’re working their way around the rocky bowl beneath a skylight, a laptop in Arumugam’s hands. Every few feet, they measure the strength of signals; instead of radio, they use low-frequency magnetic fields created by a transmitter on the surface and read by a receiver in Arumugam’s backpack. So far, they’re surprised by the signals’ strength, even through several yards of rock. A major benefit to this method is that it generates three distinct signals, which lets the user triangulate the rover’s precise location and orientation and create a rudimentary map of its route. Using the technique for communications is still slightly experimental, and no one knows whether it could be refined to transmit anything beyond cursory messages and data.
Another way around the communication problem is to give the robot more autonomy, so it can make at least some decisions about how to move, where to go, and what to look at without needing instructions from Earth. Right now, such artificial intelligence software is in its infancy. But the engineers can at least develop ways for the robots to find their way around pitch-black caves.
One relatively simple method uses infrared light to map nearby surfaces. By projecting a grid of IR light onto the rock in front of it and interpreting how the grid warps when the light bounces back, a robot can create a basic but accurate 3D model of the cave interior.
Another team at El Malpais is working on a fledgling project called PERISCOPE, which involves beaming light from an orbiting spacecraft into a cave opening, then using an extremely sensitive, extremely fast camera to measure exactly when the light returns to the orbiting sensor after bouncing off the cave walls. The result would be a synthetic image of the inside of the cave, essentially giving researchers the ability to “see around corners” and learn about the cave’s structure before setting a robotic foot on the surface.
Some of the most promising results have come from Wong, who developed a process called lumenhancement as part of CMU’s cave robots project. Using a combination of calibrated illumination, LIDAR (light-based radar), and conventional photography, he has created cave maps so detailed they look like 3D photos. He thinks they’re “probably the best models that have ever been made of an underground environment in terms of density and accuracy.”
While these technologies can help robots see underground, darkness is still their enemy. Normally, sunlight would serve as the simplest and most readily available source of electrical power for the rovers, but that’s a problem inside a cave. Back at JPL, another team is working on a technique that uses a flexible mirror deployed on the surface to reflect light into a cave opening. Additional “light piping” with more mirrors could deliver sunlight further underground. It would be better to equip the robot with its own power source, but that adds volume and weight. In its current prototype form, LEMUR is powered by a nearby gasoline generator. It has onboard batteries too, but they run out after about 90 minutes.


Considering all the logistical difficulties, it could be a decade before one of these machines launches into space. “I’m a big robot fan,” Boston says, “but it’s a long way from where we currently are to a robot that can do what I do in a cave, or even some portion of what I do in a cave.” Parness thinks that, at least from a technology standpoint, a basic version of LEMUR could be ready to go to Mars by 2026.
NASA may not be ready though. The agency has not defined its Mars plans beyond 2020, and that mission, laments Boston, will be “just another rolling robot and lander.”
The first step into an extraterrestrial cave might therefore be taken by a private company. Red Whittaker’s side project, Astrobotic, is vying for Google’s Lunar XPrize, which will award $20 million to the first privately funded team to land a rover on the moon, drive it 500 meters (about a third of a mile), and send home high-definition images and video. The Astrobotic team plans to go several steps further, mapping a partially collapsed lunar pit in a giant plateau called Lacus Mortis during the lander’s flyover, then driving right up to the edge with a 70-pound rover called Andy. If they get that far, they may even attempt to drive the robot down the ramp formed by the collapse of one side of the pit, just to see what they can see.
Whittaker says the mission is nearly ready to go. Provided it can hitch a ride on one of the next few moon-bound launches, Andy may get its chance before the decade is out. A Japanese team from Tohoku University is also trying for the prize, using two all-terrain micro-rovers, one of which is designed to anchor on the surface and lower the other one into a cave opening. The Japanese and Astrobotic teams plan to share a lander and explore the lunar pit together (they’re even planning to line up the rovers for a friendly lunar drag race).
Whittaker is optimistic that the solar system’s caves are within reach, and that robots are the way forward. “The payoff would be unbelievable,” he says. Seeing what lies beneath the lunar or Martian surface would be, he believes, “like coming upon the Grand Canyon for the first time.”
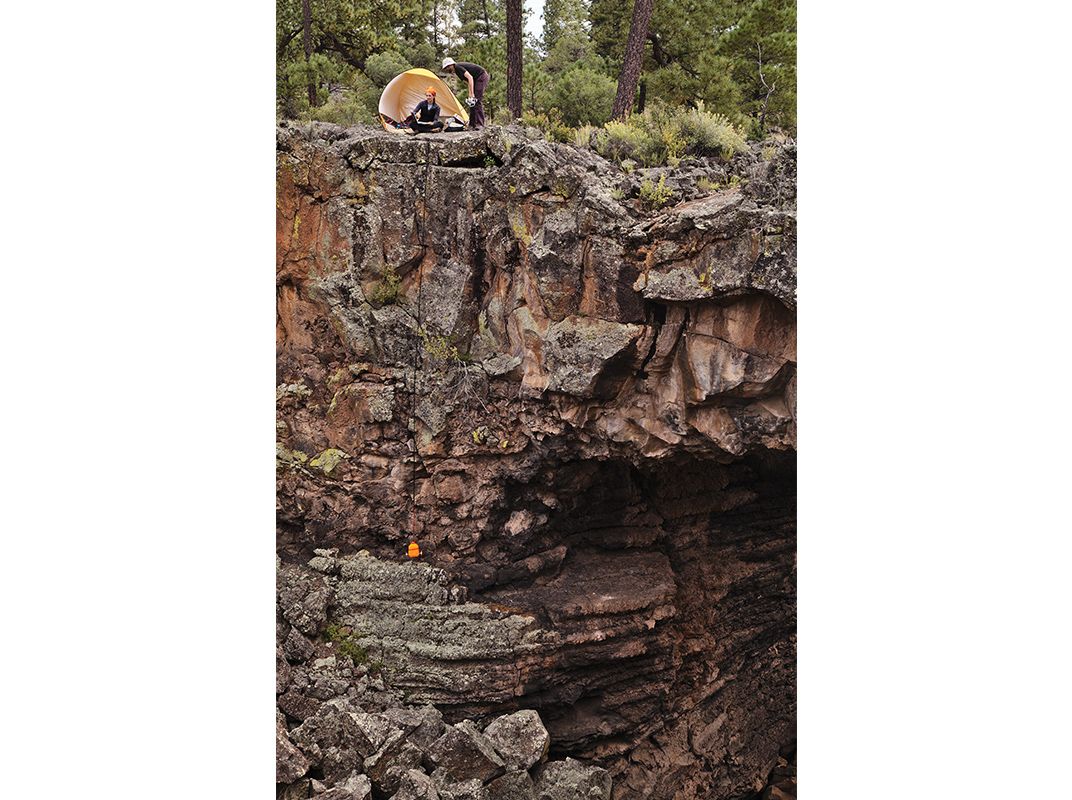
In the meantime, while LEMUR convalesces back at the hotel, another robot is being tested at El Malpais—a much simpler one. VolcanoBot is designed to be lowered into the narrow vertical fissures created during volcanic eruptions, and to map the fissure as it descends. It’s little more than a remote-controlled toy car with a camera on it. While it’s currently used in Hawaii to study lava flows, it could in principle explore similar fissures on the moon and Mars.
VolcanoBot typifies the kind of baby steps that space engineers often have to take at the start of a project. Carolyn Parcheta, the volcanologist spearheading VolcanoBot as a post-doc at JPL, is testing the little rover by simply pointing it toward a 30-foot drop along a collapsed portion of lava tube and pressing “Forward” on its controller. Even though the wheels have angled gripping spines just like those on LEMUR’s paws, VolcanoBot gets stuck before it can reach the cliff.
Parcheta leans forward and nudges it over the edge, saying gently, “There ya go, kiddo.” A few minutes later, she’s yanking the tether sideways, trying to unstick the bot from a tricky perch below; instead she knocks loose its binocular infrared camera, which now dangles by its wires. Nothing a few hours in the lab won’t fix, and Parcheta is working toward building a much more robust version.
“We need to make sure it will work regardless of where we take it,” she says, indicating the general cosmos around her. “Regardless of how many times it gets banged against the wall, it’s got to work.”